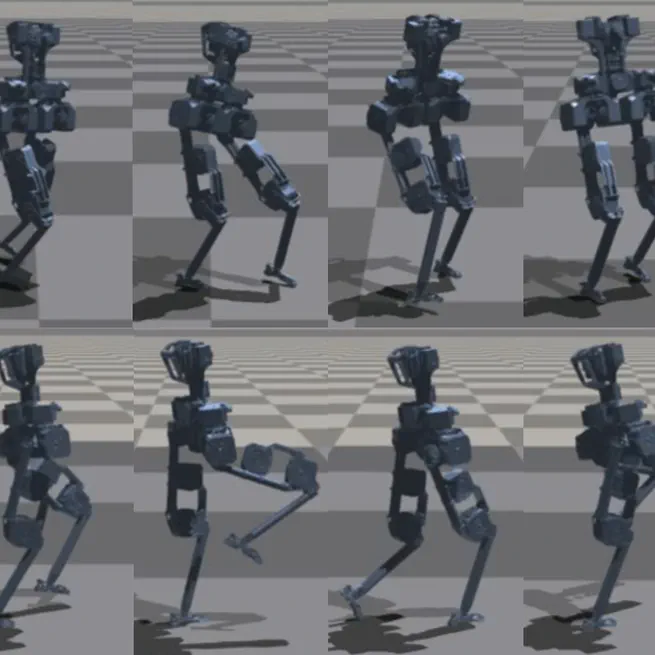
A project to enable legged robots to learn natural movements from demonstrations.
Aug 1, 2024
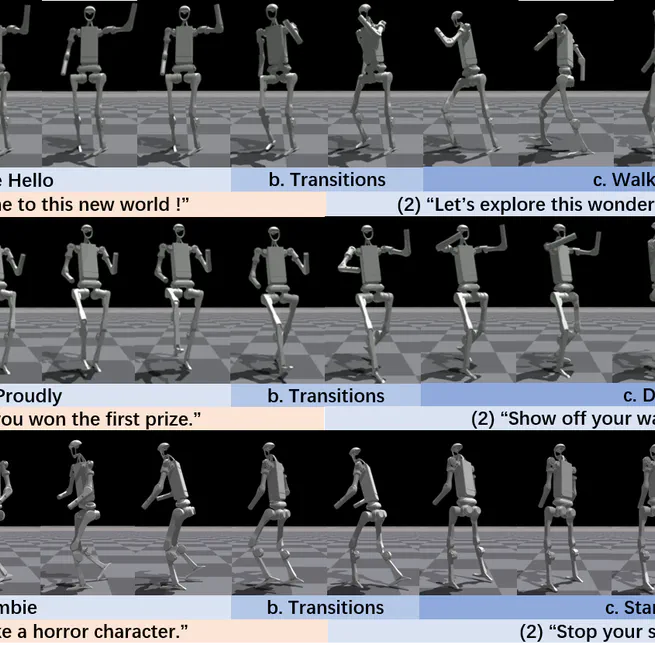
A flexible imitation learning-based multi-skill integration framework for legged robots.
Mar 15, 2024