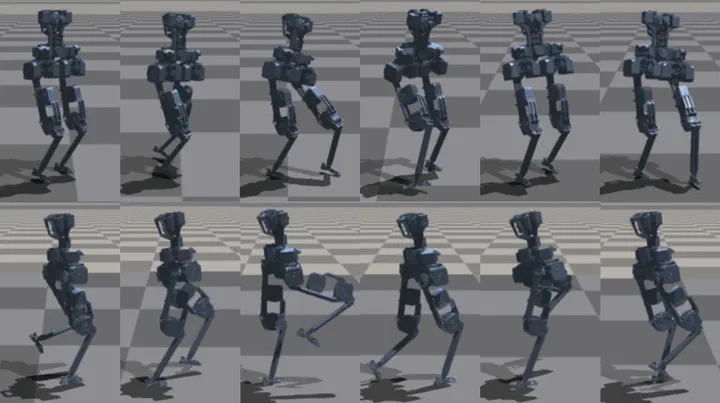
Imitation Learning for Legged RobotsAug 1, 2024 · 1 min readGo to Project SiteA project to enable legged robots to learn natural movements from demonstrations.Last updated on Aug 1, 2024Legged Robots Imitation Learning Reinforcement Learning Authors廖鸿浩Student Bipedal Locomotion Dec 31, 2023 →