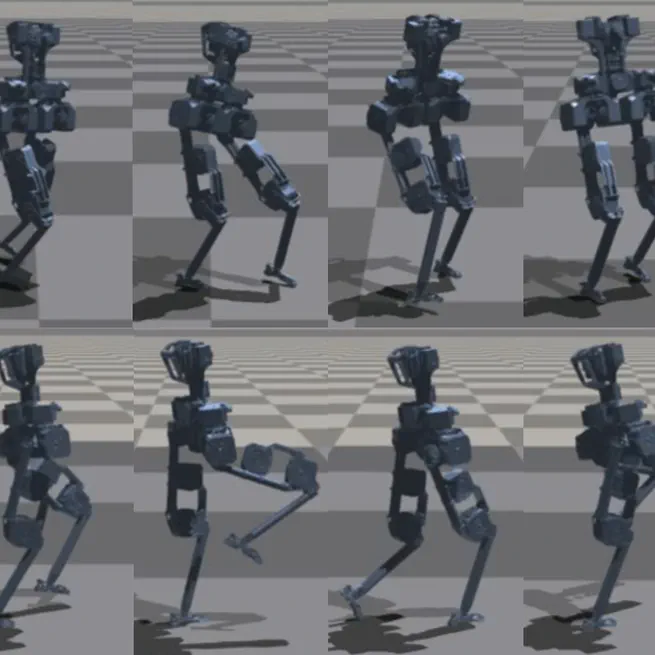
Imitation Learning for Legged Robots
A project to enable legged robots to learn natural movements from demonstrations.
Aug 1, 2024
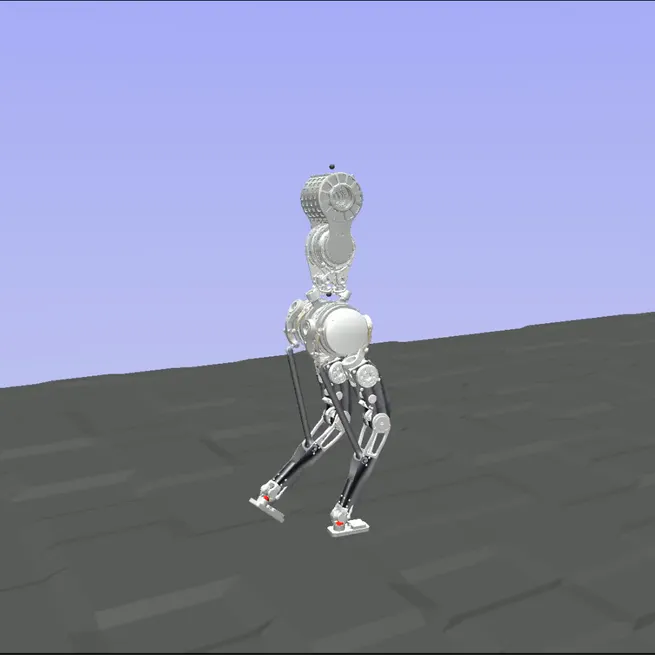
Bipedal Locomotion
Design of locomotion controller for biped robot based on model-free reinforcement learning.
Dec 31, 2023
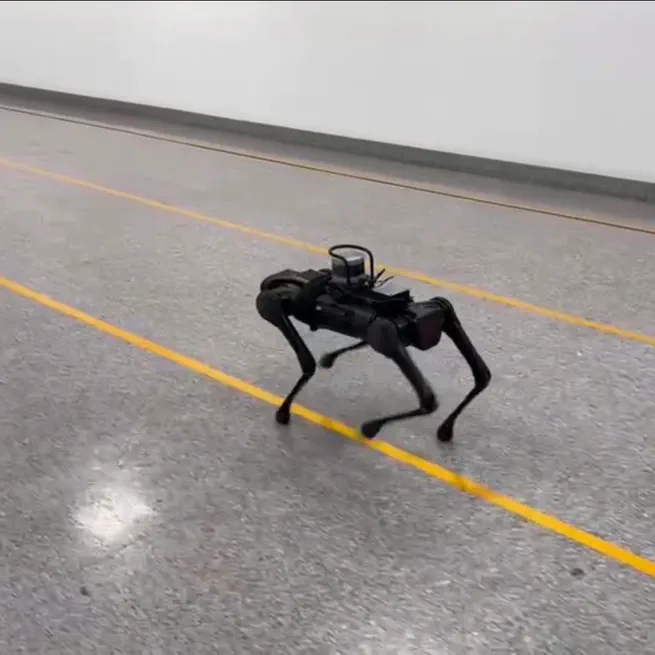
Exteroceptive Perception for Quadruped Robot
Acquiring exteroceptive sensory information for the robot Unitree AlienGo and leveraging it to some downstream tasks.
Jun 30, 2023

Smart Campus
A campus personnel monitoring and management system.
Jun 30, 2022